![U-net: replication using Pytorch [复现U-Net竟然如此简单]](https://cdn.jsdelivr.net/gh/yubaoliu/assets@image/Unet_architecture.png)
U-net: replication using Pytorch [复现U-Net竟然如此简单]
## Objective - Implement U-net use Pytorch ## Paper Ronneberger, O., Fischer, P., & Brox, T. (2015). U-net: Convolutional networks f...
Read more »
## Objective - Implement U-net use Pytorch ## Paper Ronneberger, O., Fischer, P., & Brox, T. (2015). U-net: Convolutional networks f...
Read more »
## Objective: - Install and use Realsense camera in Docker image 如何在Docker中安装与使用Realsense camera ## Docker image ### Ubuntu 16 ```...
Read more »![End-to-End Driving Via Conditional Imitation Learning [Reading Seminar]](https://cdn.statically.io/gh/yubaoliu/assets/image/End-to-end-driving-demo.gif)
# End-to-End Driving Via Conditional Imitation Learning
Read more »
# 简介 - PPT 往往对数学公式的支持很不友好,录入Latex格式的数学公式非常麻烦 - Markdown较好的支持了Latex数学公式 - Markdown可以快速的调整格式,比如 标题级别,列表 等等 # revealjs 这是一个Javascript 工程,用...
Read more »
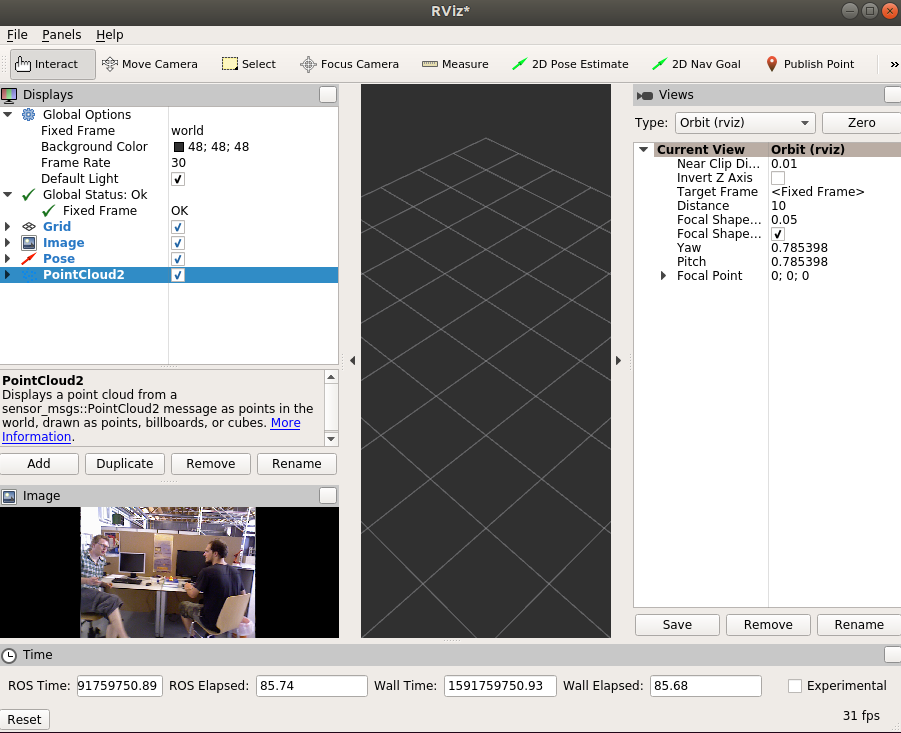
# Issue GUI cannot be started when I run RVIZ and other GUI programs ```sh root@yubao-desktop:~/catkin_ws/src# rosrun rviz rviz QStandard...
Read more »
# Synopsis - Study Notes of the paper: Detect-SLAM Zhong, F., Wang, S., Zhang, Z., Chen, C., & Wang, Y. (2018). Detect-SLAM: Making ...
Read more »
## Skey-symmetirc symple: a^\hat{} b ## Example: $$ a \times b = \begin{bmatrix} i & j & k \\\ a_1 & a_2 & a_3 \\\ b...
Read more »
## Latex source code - Method 1: ```latex \documentclass{article} \usepackage{amsmath} \begin{document} \begin{equation} D_{it} = ...
Read more »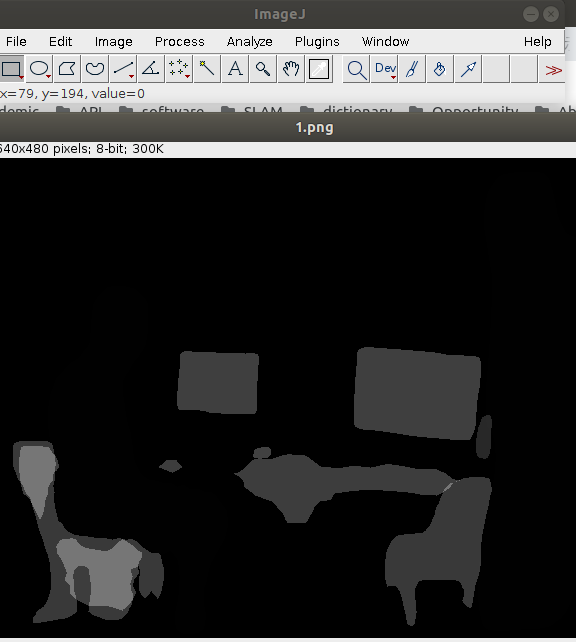
# Imagej Download - https://imagej.nih.gov/ij/download.html
Read more »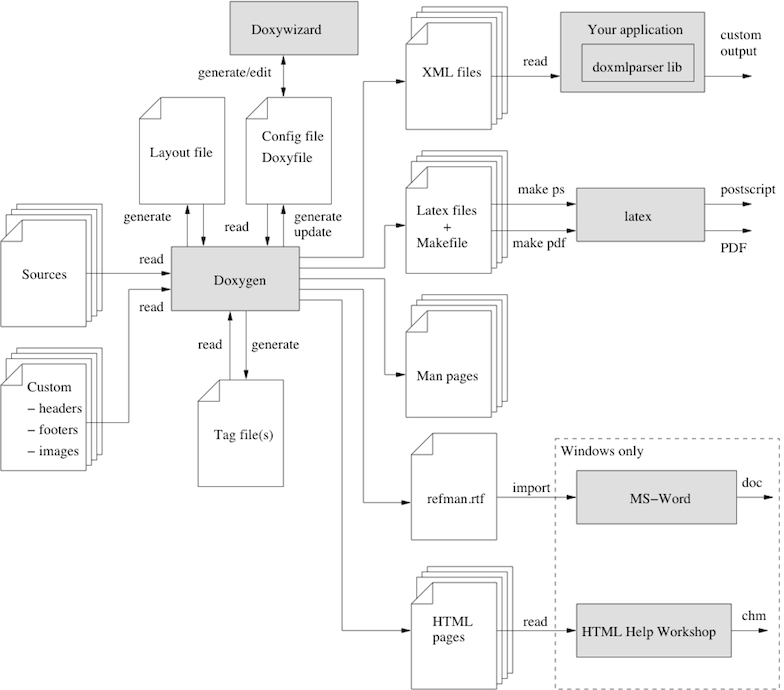
# Install doxygen ```sh sudo apt install doxygen* ``` # How to use doxygen - Step 1: Creating a configuration file ```sh doxygen -g...
Read more »
## Method 1 ```sh git checkout gh-pages git checkout -- git add . git commit -m "update" git push git checkout master ```
Read more »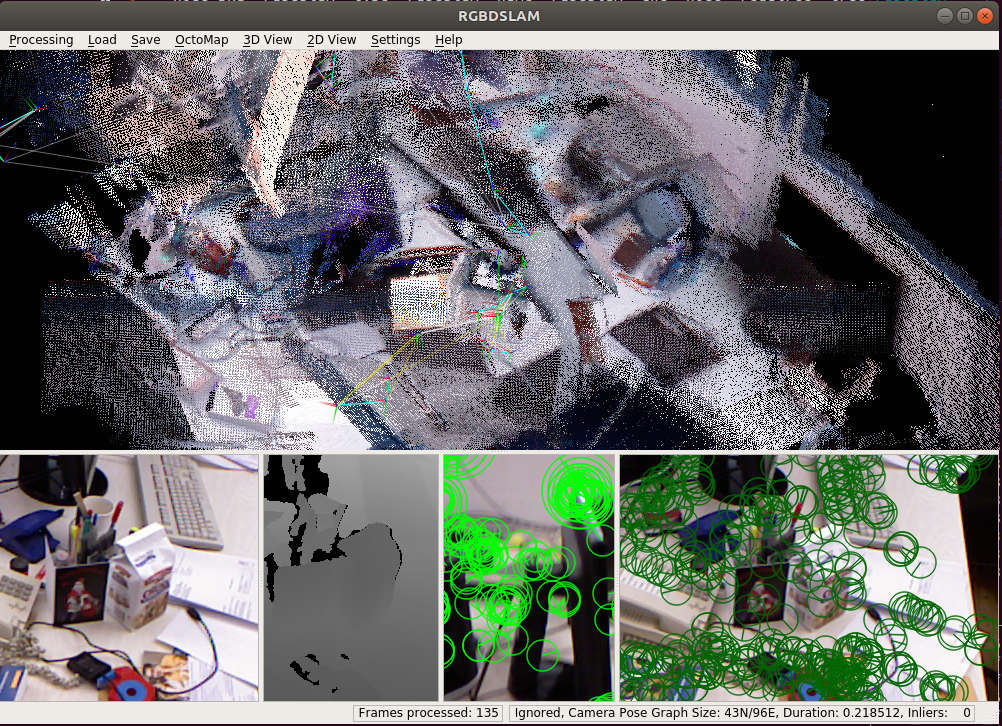
# Objective - Build development environment - Build RGBD SLAM v2 - Run RGBD SLAMv2 use TUM dataset # Environment - Host: Ubuntu18 - Dock...
Read more »
Docker: disable setting time zones and keyboard
Read more »
教你免费搭建自己的wordpress博客 [toc] # 利用 Google Cloud Platform免费搭建Wordpress 永久免费方案: https://cloud.google.com/free/ 在这个范围内是永久免费的
Read more »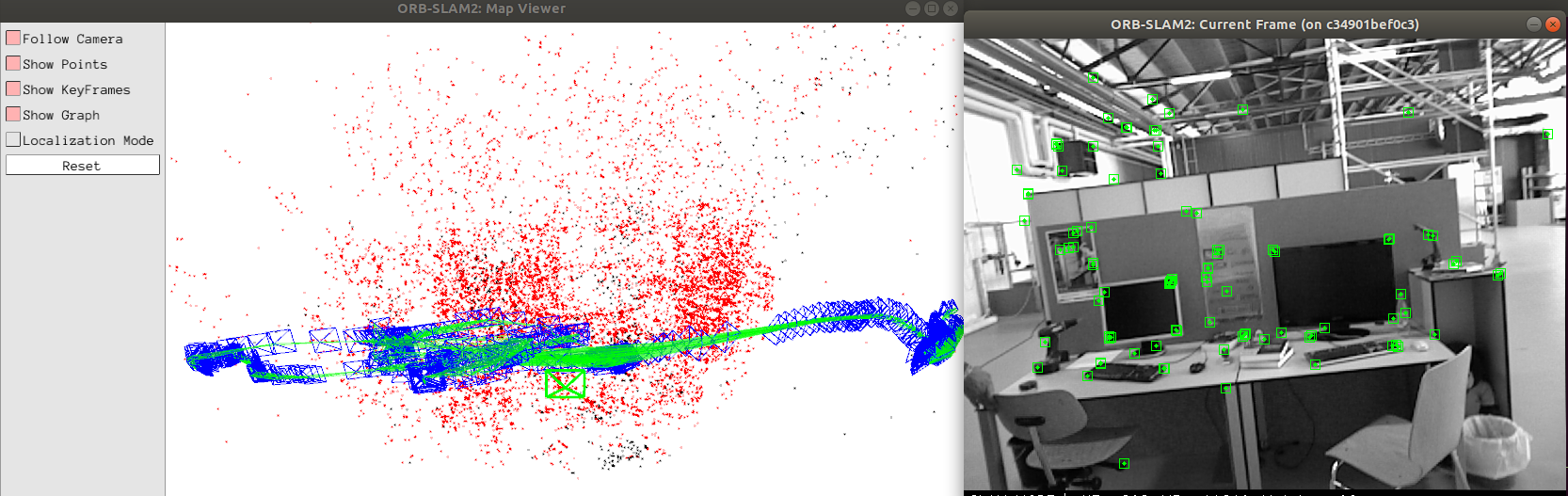
# 目标 - 如何使用TUM数据集? - 如何用SLAM跑TUM数据集? - 如何评价SLAM定位的好坏? # 获取数据集 - [TUM RGBD dataset](https://vision.in.tum.de/data/datasets/rgbd-dataset/d...
Read more »
## Error Description ```sh File "/home/yubao/data/software/rgbd_benchmark_tools/scripts/evaluate_ate.py", line 210, in imp...
Read more »
# Targets - Run pangolin in a seperate thread # Source code ```cpp #include #include #include <pangolin/pangolin.h>...
Read more »
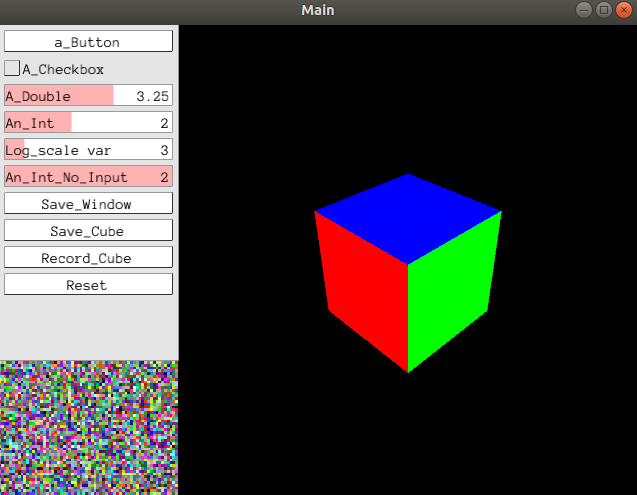
# 目标 - 在着色器之间传送数据 - 从CPU向GPU里传送数据(使用uniform), 动态改变颜色的值 # 在着色器之间传送数据 ## 关键代码: ```cpp // 顶点着色器 const char* vertexShaderSource ...
Read more »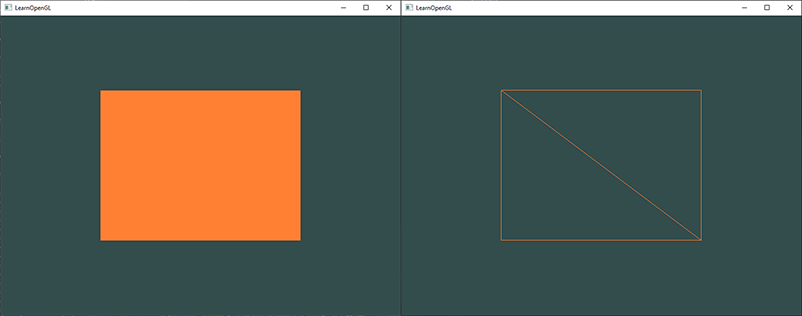
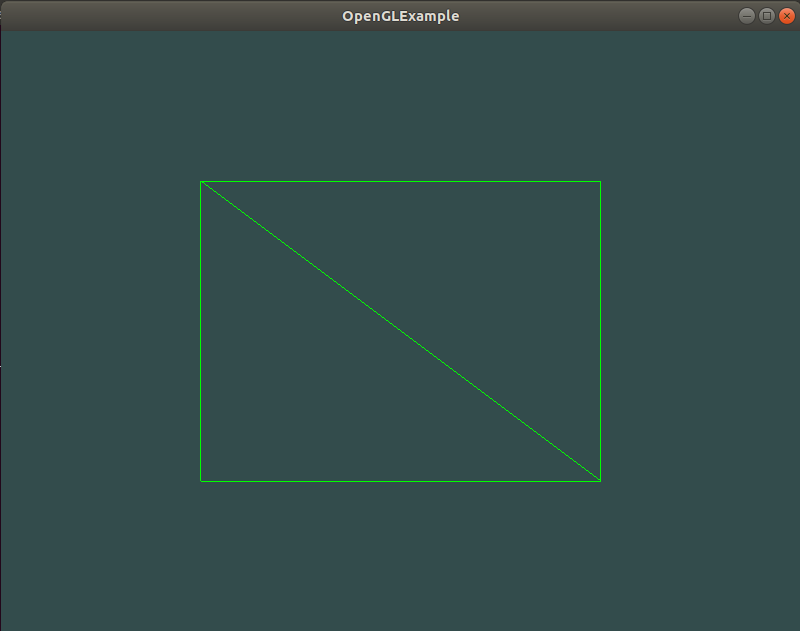
# 目标 - 画一个矩形 # 原理 ## 坐标 一个矩形相当于两个三角形 两个三角形的坐标为: ```cpp float vertices[] = { // first triangle 0.5f, 0.5f, 0.0f, // t...
Read more »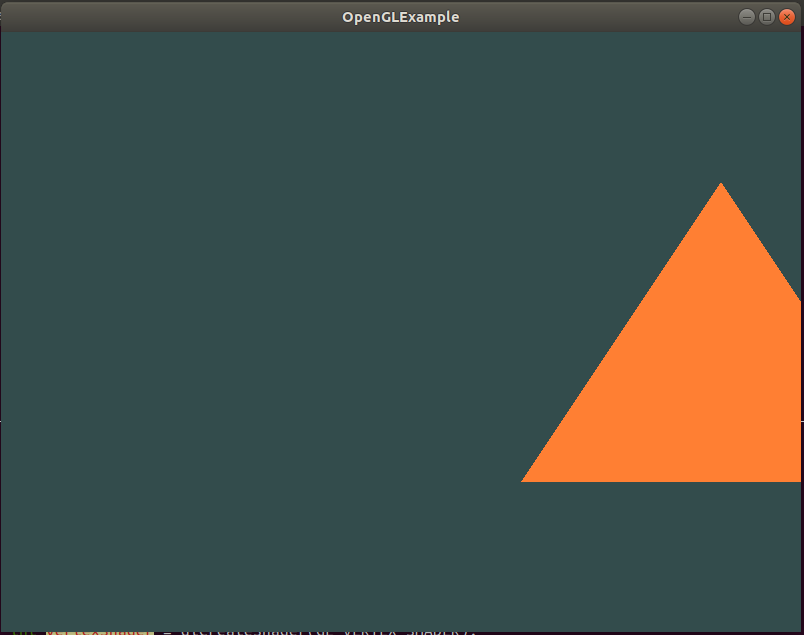
## 目标: - 使用顶点着色器对三角形向右平移0.8个单位 ## 顶点着色器 ```cpp // 顶点着色器 const char* vertexShaderSource = "#version 400 core\n" ...
Read more »
# 目标 - 学会使用VAO, VBO - 画一个三角形 (使用默认着色器) # 原理 ## 归一化坐标表示 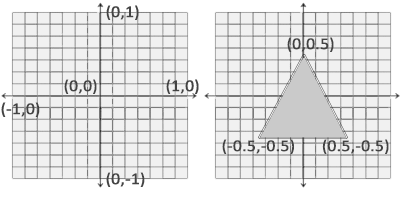 ## vertex buffer ob...
Read more »
## 目标 使用自定义着色器画一个三角形 ## 编写着色器程序的步骤 - 将着色器源码存入字符串 - 创建着色器对象 - 将源码字符串赋予着色器对象 - 编译着色器 - 创建着色器程序 - 将编译好的着色器附加到程序对象上 - 链接生成程序 ## 着色器程序 ``...
Read more »
## 目标 - 搭建OpenGL开发环境 - 运行出一个OpenGL窗口程序 # Requirements - GLFW - GLAD: https://glad.dav1d.de/ Project tree: ```sh ├── CMakeLists.txt...
Read more »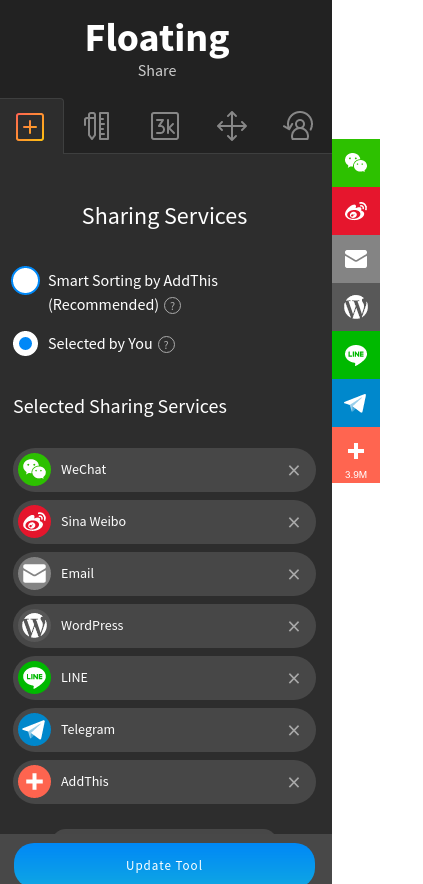
How to add share buttons to blogger? 如何在blogger中添加分享按钮,比如说添加微信分享按钮。 传统的blogger分享按键是不全的,而且通常只有国外常用的平台,没有微信这些分享功能。 本文将介绍如何使用Add This 来实现这样...
Read more »
# Documents - [How To Use Google Logging Library (glog)](http://rpg.ifi.uzh.ch/docs/glog.html) - [FindGlog.cmake Version 1](https://githu...
Read more »
## How to use VTK in Cmake project? ```sh find_package(VTK) include(${VTK_USE_FILE}) add_executable(creating_widgets creating_widgets.cpp ...
Read more »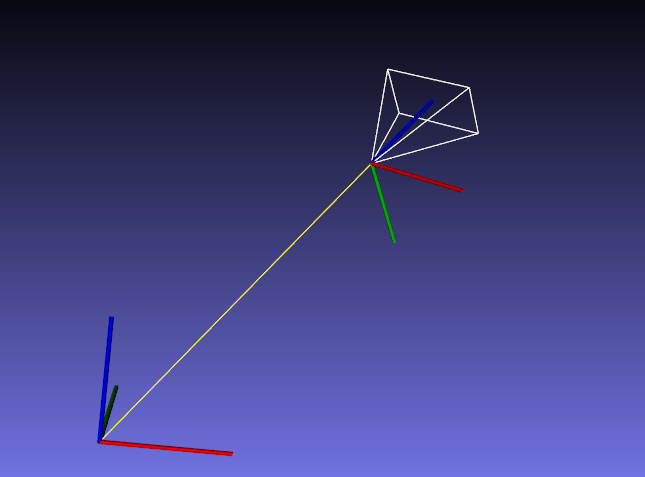
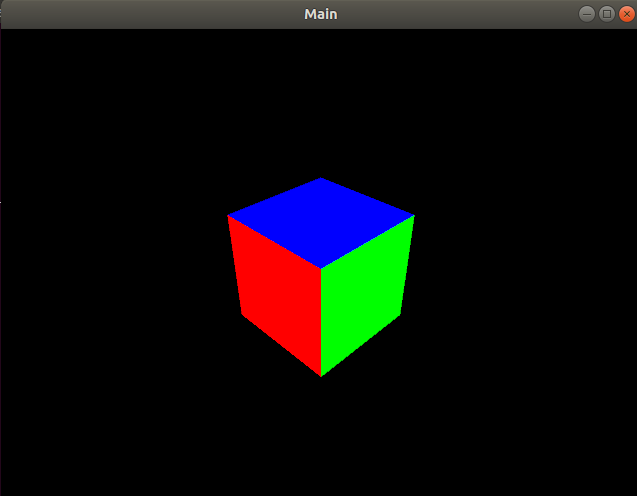
# 目标: - 使用OpenCV cv::viz模块来绘制世界坐标系 - cv::viz: How to show World coordinate and Camera coordinate? # Sample Code ```cpp #include #inclu...
Read more »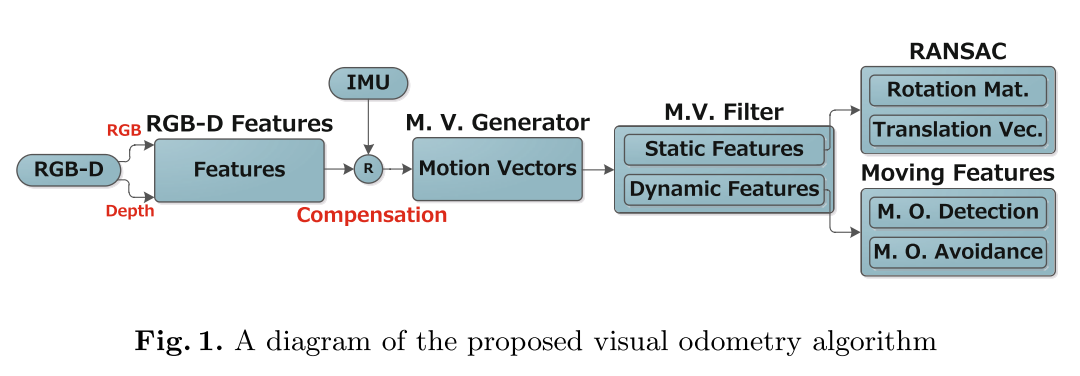
# 2015-Visual odometry algorithm using an RGB-D sensor and IMU in a highly dynamic environment - 本文使用IMU来判别动态特特征点 - 不符合主流移动趋势的点判别为动态点 - ...
Read more »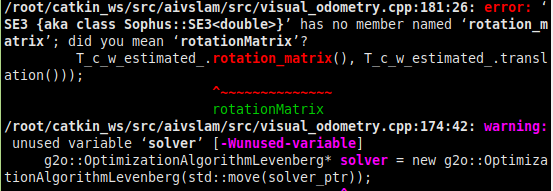
## Error Description ## Solution Change ``rotation_matrix`` To ``rotationMatrix``
Read more »
# OpenCV Installation ## Get OpenCV ```sh git clone https://github.com/opencv/opencv.git git clone https://github.com/opencv/opencv_contr...
Read more »![ORB SLAM (1-3) [Reading Seminar]](https://cdn.statically.io/gh/yubaoliu/assets/image/ORBSLAM3_main_system.png)
# ORB SLAM Versions - Campos, C., Elvira, R., Rodríguez, J. J. G., Montiel, J. M. M., & Tardós, J. D. (2020). ORB-SLAM3: An Accurate O...
Read more »
## Inkscape 
Read more »
GTest: FindPackageHandleStandardArgs.cmake:137 (message): Could NOT find GTest
Read more »
## Error Description Sophus: fatal error sophus/se3.h: No such file or directory ## Solution ```cpp #include #include typedef S...
Read more »